This project was developed as an assignment for SFU’s “Computational Vision” course. The program uses the photometric stereo technique to recover surface normals and relative pixel z-distances from sets of 3 images taken from the same position with varied light locations.
The tool is written from scratch in MATLAB. It generates a 3 dimensional inverse lookup table to index gradient-space (p, q) coordinates as a function of image intensity ratios and approximate light positions.
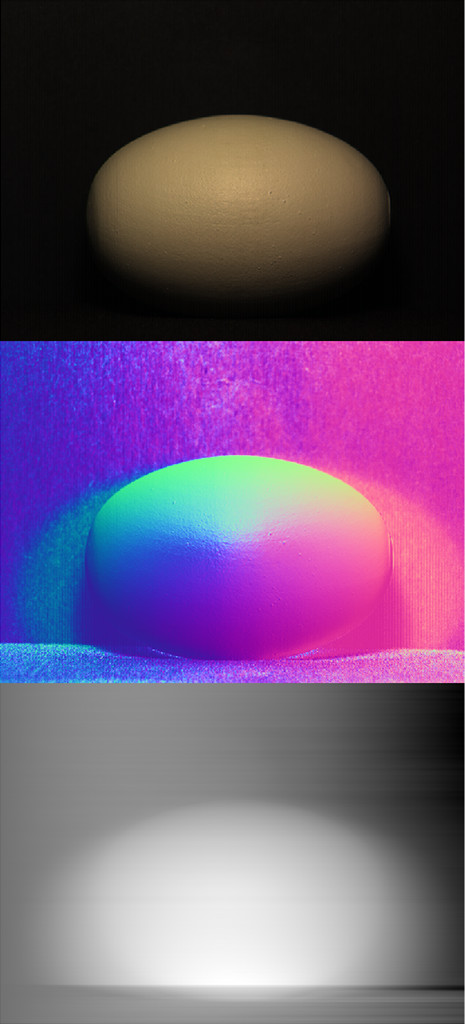
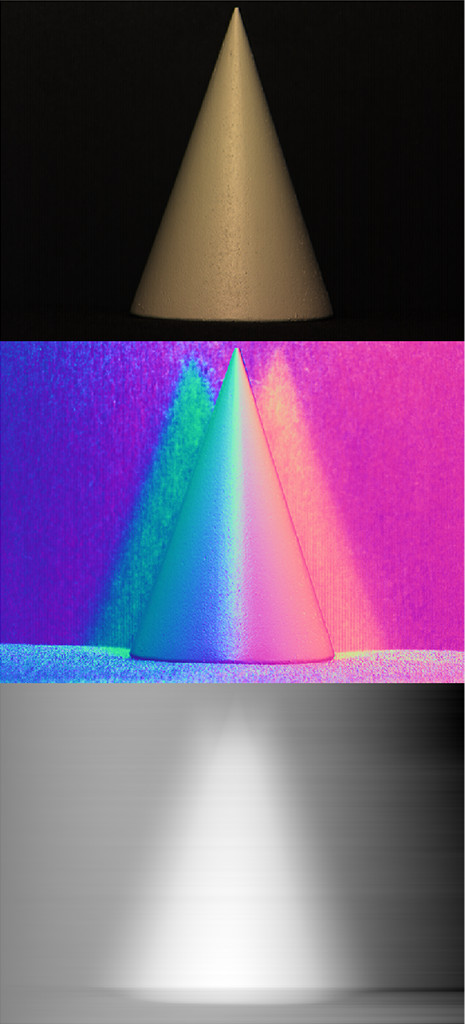
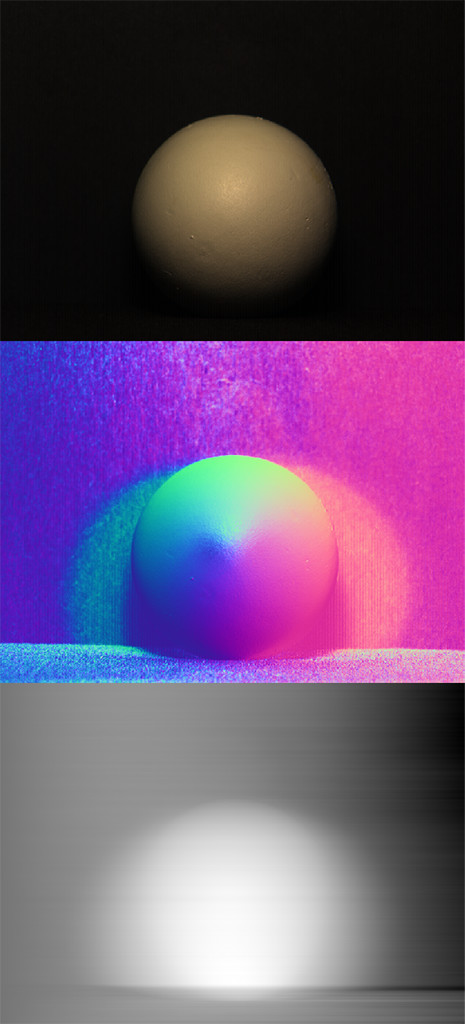
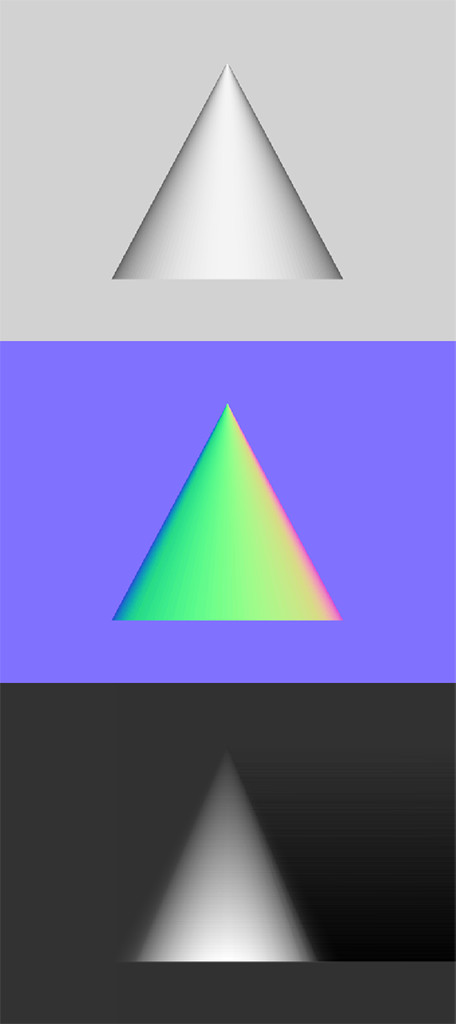
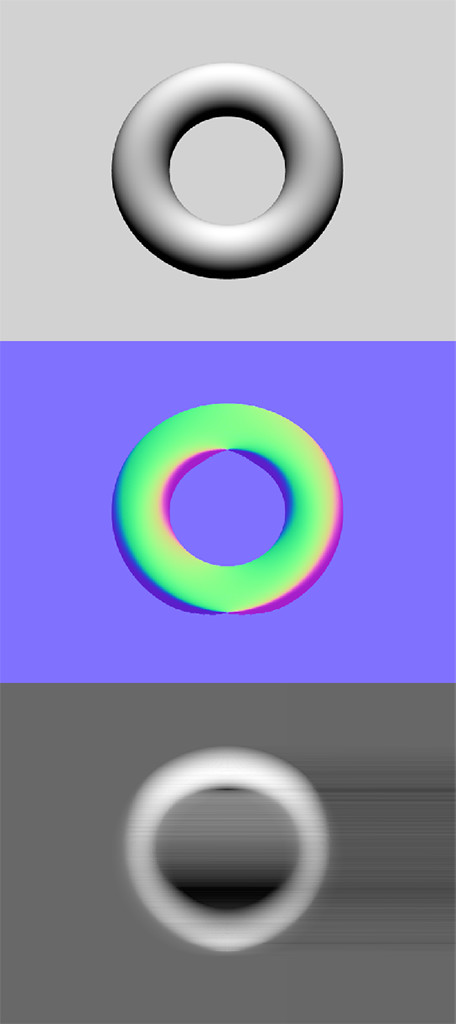
The program then uses the lookup table to efficiently process images in sets of 3 at a time, computing per-pixel surface orientations in terms of gradient and normal direction. Then, it performs <em>integration along a path</em> to approximate the relative z-distance of each pixel, providing an overall description of the object’s shape.
The program outputs a tangent-space normal map (R = x ∈ [-1, 1], G = y ∈ [-1, 1] mapped to [0, 255], and B = z ∈ [0, 1] mapped to [128, 255] ), a grayscale map of an integrated approximate of z-depth, and quiver plots of the surface gradient (not shown).